Características generales
Una nube de puntos es un conjunto de vértices definidos en un sistema de coordenadas tridimensional. Cada punto se identifica habitualmente mediante coordenadas X, Y y Z, y puede incorporar información adicional como color, intensidad, clasificación u otros datos asociados a la captura. Las nubes de puntos permiten representar con gran precisión la superficie exterior de edificios, espacios, terrenos, instalaciones u otros objetos reales.
También es posible obtener nubes de puntos del terreno mediante sistemas LIDAR (Light Detection and Ranging), que capturan información geométrica a partir de sensores láser. Estos datos pueden proceder de escaneado láser terrestre, equipos móviles, drones o sistemas aerotransportados (ALS), y resultan especialmente útiles en trabajos de levantamiento, rehabilitación, documentación de edificios existentes, patrimonio, topografía y digitalización de entornos construidos.
TK-LIDAR es un complemento para TeKton3D que habilita la importación, visualización y referenciado de nubes de puntos obtenidas mediante sistemas de captura 3D. El módulo permite utilizar la nube como referencia geométrica dentro del entorno de trabajo de TeKton3D, facilitando la toma de medidas, el trazado de entidades y el modelado de edificios e instalaciones a partir de información real capturada en obra.
Formatos soportados
TK-LIDAR habilita la opción de menú Archivo / Importar / Importar Nube de Puntos, que permite importar nubes de puntos en distintos formatos habituales de escaneado láser y captura de realidad:
- Cyclone pointcloud export format (*.pts; *.ptx)
- LAS file format (*.las)
- Leica Geosystems point cloud format (*.lgs; *.lgsx)
El soporte de los formatos LGS y LGSX de Leica Geosystems™ permite trabajar directamente con nubes de puntos procedentes de flujos Leica, evitando conversiones intermedias y facilitando la integración de datos reales en proyectos BIM y de instalaciones.
La lectura directa de archivos LGS y LGSX permite acceder a los puntos contenidos en la nube, respetando la información disponible en el archivo original, como colores, intensidades y estructura de los datos. Esta compatibilidad facilita el uso de escaneados láser 3D en proyectos de levantamiento, reforma, ampliación, rehabilitación y coordinación de instalaciones.
Importación y rendimiento
Durante la importación de nubes de puntos de gran tamaño, TK-LIDAR puede limitar el número de puntos importados para mantener un rendimiento adecuado en el entorno de trabajo. Cuando la nube supera un volumen elevado de puntos, el usuario puede optar por conservar la nube completa, reducirla a un número máximo de puntos o cancelar la importación.
Esta opción permite adaptar el volumen de información importada a las necesidades del proyecto y a la capacidad del equipo, manteniendo un equilibrio entre precisión, fluidez de visualización y rendimiento durante el trabajo con el modelo.
Edición de propiedades
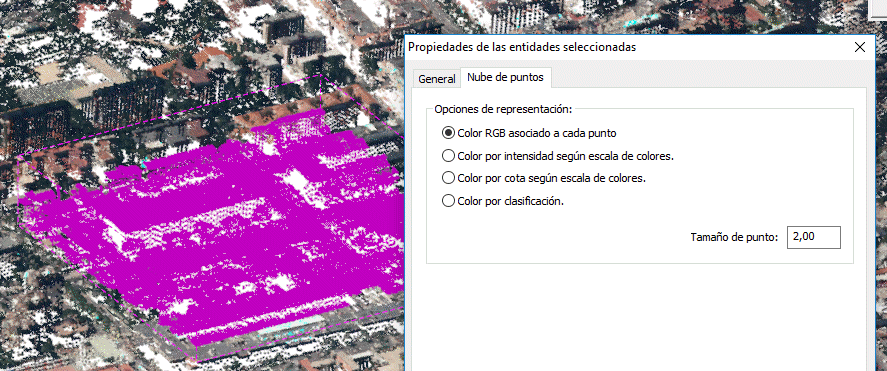
Una vez importado el fichero, se crean una o varias entidades de tipo Nube de puntos de escáner con los conjuntos de puntos importados. Es posible cambiar las propiedades de una nube de puntos mediante el cuadro de diálogo de propiedades geométricas de la entidad seleccionada, accesible mediante la tecla de acceso rápido e:
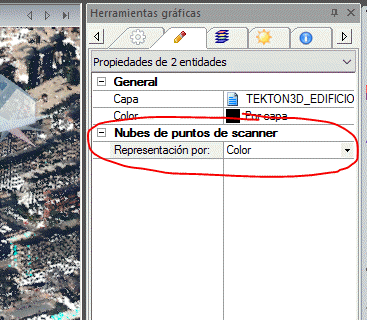
También es posible modificar las propiedades de un conjunto de nubes de puntos seleccionadas mediante la solapa de propiedades del panel de herramientas gráficas:
Modos de visualización
TK-LIDAR permite controlar la representación gráfica de las nubes de puntos para facilitar su interpretación dentro del modelo. Entre las opciones disponibles se incluye la representación en escala de grises, aplicable a los modos de visualización activados.
La escala de grises puede resultar útil para mejorar la lectura de la nube en determinados proyectos, reducir la influencia visual del color original de la captura o facilitar el contraste con las entidades del modelo BIM/MEP y las instalaciones dibujadas en TeKton3D.
Herramientas
Puede utilizar la Caja de recorte para limitar la visibilidad de los puntos en distintos planos y facilitar el uso de la geometría importada. Esta herramienta permite aislar zonas concretas de la nube y trabajar con mayor comodidad en áreas específicas del edificio o del terreno.
Es posible trazar entidades de dibujo aprovechando los puntos de la nube mediante la referencia automática por punto final. Al pasar el cursor del ratón sobre los puntos, TeKton3D selecciona automáticamente el punto de la nube más cercano, lo que permite realizar medidas o trazar elementos geométricos de forma precisa basándose en la geometría capturada por el escáner 3D.
Gracias a estas herramientas, TK-LIDAR facilita el uso de nubes de puntos como base de trabajo para modelar espacios existentes, verificar dimensiones reales, documentar el estado actual de un edificio y coordinar el diseño de instalaciones sobre una geometría capturada con precisión.
